
WiFi Bot Control Pro
Limited time Sale! Control your robot and view an IP Camera video stream all over WiFi.
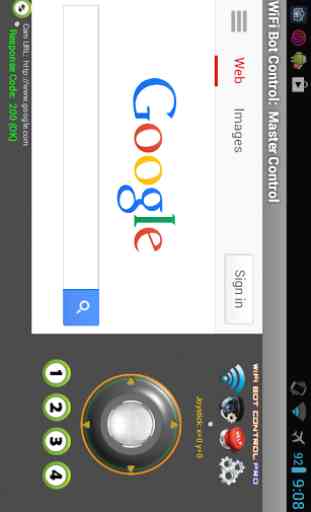
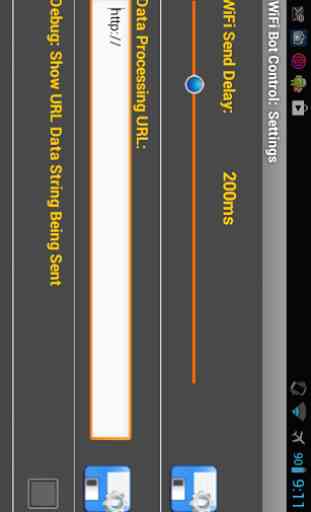
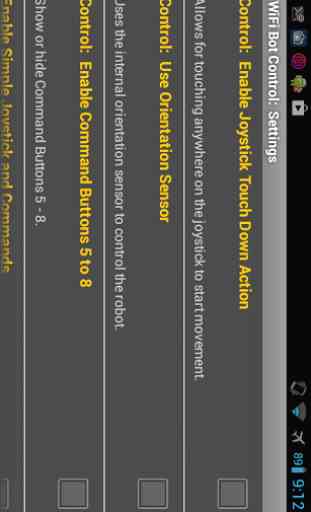
:: 3 Joystick Modes: Default, Simple Mode and Orientation Sensor:: Provides both direction and acceleration to give you complete control (default joystick).:: Configurable camera URLs (up to 3):: Configurable joystick control URL:: Read and display sensor and other data from your microcontroller.:: Supports up to 8 additional commands. :: Configurable WiFi packet interval.:: Supports most micro controller
- requires WiFi module/capabilities.:: Sample Arduino Sketches provided (below link).:: Screen automatically re-sizes for smaller phones.:: New! WiFi Bot Control has the ability to show data passed from your robot/sensors.
Joystick Modes:
:: Default Joystick Mode:When you move the joystick, x and y coordinates representing both speed and direction are parsed into a URL string and transmitted.
:: Simple Joystick Mode:In Simple Joystick mode, the joystick has 4 arrows representing Forward (U), Reverse (D), Left (L) and Right (R). When you tap the arrows, the respective character is parsed into a variable within the URL string and transmitted.
:: Command Mode:You can add custom features to your robot / device with additional commands by customizing the sample sketch provided. When a Command button is clicked, a value (1-8) is parsed into the URL string and transmitted.
Instructions and further details are provided at the link below.
:: High Level Requirements:1) You need a robot / device with a micro-controller. You also need a motor driver and a WiFi module/shield. The samples were developed using the Adafruit CC3300 breakout module. It should also work with Spark Core (www.spark.io) or the Arduino (and other) WiFi shields with little modification to the code.
2) You must have a server (local or remote) that can host a few small files.
3) An android phone or tablet and this application.
:: How it Works:
- The robot constantly polls the server and parses the json data file for updated movement / command instructions
- When using the joystick or command buttons in WiFi Bot Control, the app will send a URL string through a web component to a user customizable URL defined in the app. A php file will update the json file with the updates motor / command instructions. The Arduino, via the WiFi module, calls on a php file to parse the json file and return the values it needs. It then processes this data to command the robot.
:: IP CameraThe IPCam stream is viewed through a simply web page that must also be set-up. This is optional. Details below.
:: Other Stuff:The orientation sensor joystick mode may not work on all devices. Although attempts were made to have this app work on a variety of screen sizes, it is difficult to test all and ensure that it will size correctly. There may be issues on small phones. Be sure to test the non-Pro version first. This app has been tested in a number of devices including; Samsung Galaxy S, Samsung Galaxy Tab III, HTC Desire, Samsung Nexus One. Screen has been optimized for medium sized phones and also tablet screen sizes.
More information can be found at http://www.plastibots.com
:: 3 Joystick Modes: Default, Simple Mode and Orientation Sensor:: Provides both direction and acceleration to give you complete control (default joystick).:: Configurable camera URLs (up to 3):: Configurable joystick control URL:: Read and display sensor and other data from your microcontroller.:: Supports up to 8 additional commands. :: Configurable WiFi packet interval.:: Supports most micro controller
- requires WiFi module/capabilities.:: Sample Arduino Sketches provided (below link).:: Screen automatically re-sizes for smaller phones.:: New! WiFi Bot Control has the ability to show data passed from your robot/sensors.
Joystick Modes:
:: Default Joystick Mode:When you move the joystick, x and y coordinates representing both speed and direction are parsed into a URL string and transmitted.
:: Simple Joystick Mode:In Simple Joystick mode, the joystick has 4 arrows representing Forward (U), Reverse (D), Left (L) and Right (R). When you tap the arrows, the respective character is parsed into a variable within the URL string and transmitted.
:: Command Mode:You can add custom features to your robot / device with additional commands by customizing the sample sketch provided. When a Command button is clicked, a value (1-8) is parsed into the URL string and transmitted.
Instructions and further details are provided at the link below.
:: High Level Requirements:1) You need a robot / device with a micro-controller. You also need a motor driver and a WiFi module/shield. The samples were developed using the Adafruit CC3300 breakout module. It should also work with Spark Core (www.spark.io) or the Arduino (and other) WiFi shields with little modification to the code.
2) You must have a server (local or remote) that can host a few small files.
3) An android phone or tablet and this application.
:: How it Works:
- The robot constantly polls the server and parses the json data file for updated movement / command instructions
- When using the joystick or command buttons in WiFi Bot Control, the app will send a URL string through a web component to a user customizable URL defined in the app. A php file will update the json file with the updates motor / command instructions. The Arduino, via the WiFi module, calls on a php file to parse the json file and return the values it needs. It then processes this data to command the robot.
:: IP CameraThe IPCam stream is viewed through a simply web page that must also be set-up. This is optional. Details below.
:: Other Stuff:The orientation sensor joystick mode may not work on all devices. Although attempts were made to have this app work on a variety of screen sizes, it is difficult to test all and ensure that it will size correctly. There may be issues on small phones. Be sure to test the non-Pro version first. This app has been tested in a number of devices including; Samsung Galaxy S, Samsung Galaxy Tab III, HTC Desire, Samsung Nexus One. Screen has been optimized for medium sized phones and also tablet screen sizes.
More information can be found at http://www.plastibots.com
Category : Tools
Related searches
Reviews (2)
Jos. H.
Nov 22, 2017
works as described. Great fun app.
A quick way to get up and running with a web architecture. Issue: No keep-alive packets. I modified the PHP file on the server to check the file age before serving data to the Arduino; I don't want my robot to drive to the horizon if the Android loses connection. Solution appears to be nervously tapping the joystick. Suggest a keep-alive time in the settings. Issue: Orientation sensor uses a range of +/- 100, but manual control uses +/- 70. I don't know if the Arduino can tell how the joystick is configured. Issue: Buttons are momentary not push-on, push-off. Could there be an option in the settings for the buttons to have states (maybe add an array of states to the command string)? Buttons with states (e.g. LOW gear / HIGH gear) would be more compatible with REST architecture, less dependency on setting the timing just right. Please add!